Available as/for:appimagerelease-gitx86-64
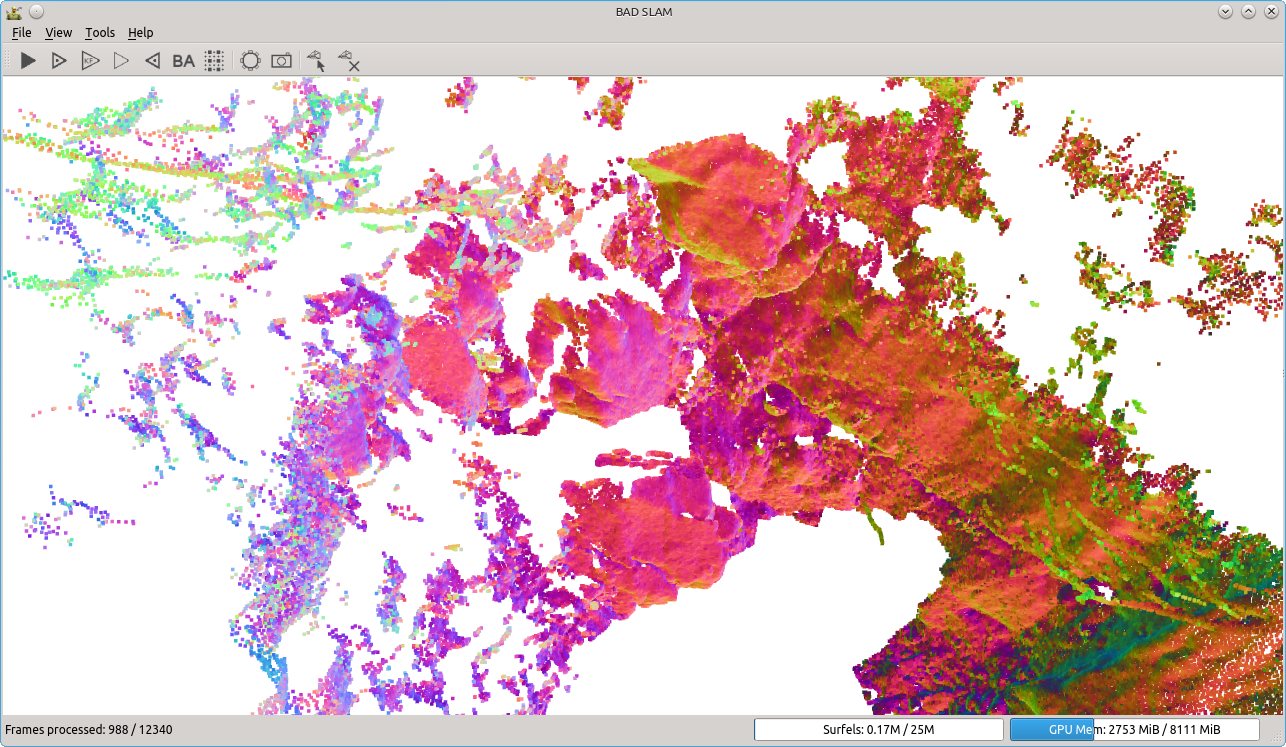
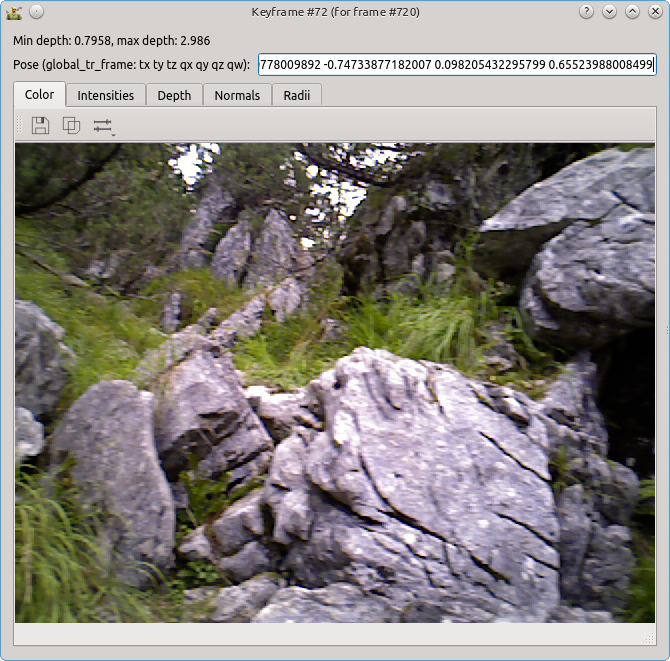
Description:BAD SLAM is a real-time approach for Simultaneous Localization and Mapping (SLAM) for RGB-D cameras. Supported platforms are Linux and Windows. The software requires an NVidia graphics card with CUDA compute capability 5.3 or later.
NOTE: This is only to provide appimages, I am not the developer.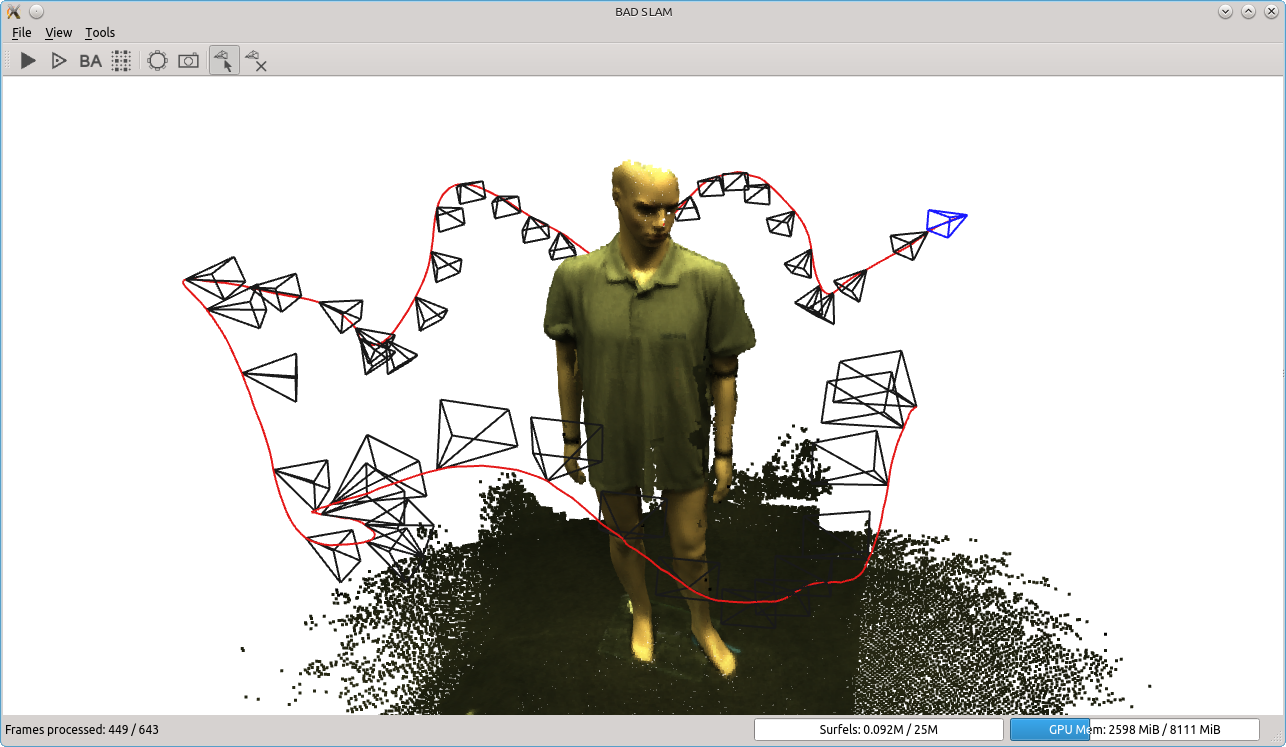















Ratings & Comments
0 Comments